14214 Views
Mobility
Maps for pedestrians and for all kinds of ‘mobilities’
Digital maps and navigators make life easier for many drivers. But what happens to
To drive with the degree of safety we have now, it’s not enough to have a well designed highway. A number of different variants must be studied, such as the amount of traffic that is going to be handled at different times of day and the varied weather conditions.
That’s why it is necessary to have studies that deal with the highways of the future, which are closer and closer to becoming a reality and where traditional automobiles will move alongside autonomous vehicles. The arrival of this kind of car will necessarily change everything, from the way we drive to the rules of the road. And it’s important to anticipate all of this.
Conscious of the importance of the link to the academic world for social and economic progress, Abertis promotes the training, research and dissemination of knowledge between university and company. To that end it has created the Abertis Chairs International Network –which includes Spain, France, Puerto Rico, Chile, Brazil, Mexico and Italy– and which seeks to promote that relationship and spread knowledge.
Last September the Abertis Chair, which is associated with the Polytechnic University of Madrid (UPM) and the Polytechnic University of Catalonia (UPC), awarded its Abertis Prizes for research about the management of infrastructures, transport and road safety in Spain. These prizes recognize the best doctoral theses or end-of-studies works related to the management of road infrastructures in all their varieties. Because of the pandemic, the 2019 and 2020 editions were held simultaneously.
Marcel Sala, of the Polytechnic University of Catalonia, was the winner of the XVII edition of these prizes, corresponding to 2019, in the category of Transport Infrastructure Management for the doctoral thesis Modeling present and future freeway management strategies: Variable speed limits, lane-changing and platooning of connected autonomous vehicles.
We have spoken with him about his study and about the future of highway and freeway management with regard to autonomous vehicles. And this is what he told us.

Can you summarize what your project consists of?
It is an analysis and modeling work about highway traffic under different conditions. Data was gathered at an access highway to Barcelona that had variable speed limits, with the aim of discovering the impacts of different speed limits on traffic flow at peak hours. To that end, lane changes were counted using video recordings, because it has been proven that an increase in lane changes reduces traffic fluidity.
Seeing that improving traffic with conventional means was limited, I decided to explore the possibilities of the autonomous vehicle, but because they were so few, a theoretical model was developed. This led me to conclude that, if properly managed, the capacity of highways could more than double without adding any more lanes.

We haven’t fully solved driving problems on the roads and then these driverless vehicles come along to complicate things even more. How will they affect the way highways are managed? What other problems are anticipated?
Autonomous vehicles provide a unique opportunity to improve and solve the problems that persist on the roads, both in safety and traffic fluidity, because they are capable of analyzing reality thousands of times per second, and to communicate among themselves in a way that’s much more complete and precise.
The reality is that for this to happen we have to answer the opposite question: How should autonomous vehicles be used so that their presence will improve highway traffic? And the answer is complex, but some standards should be established, ideally on a European level, concerning how they should behave and interact so that the vehicles from different manufacturers can be completely compatible, and fully cooperate with each other. If not, we may find that only the vehicles from the same brand can cooperate among themselves.
In addition to the solutions that you present in your thesis –establishing variable speed limits and regulating lane-changing– what other initiatives would be needed to solve those problems?
In general, the solutions for improving traffic are classified depending on the degree to which they allow for an increase in fluidity or a reduction in demand. My thesis concentrates only on some measures that permit an increase in capacity, but there are other factors, mainly building more lanes, solving bottlenecks or using the road’s shoulder.
But these measures should be accompanied by others that control demand, such as toll roads (ideally with changing prices depending on the traffic conditions), improvements in public transport, shared vehicles, restricting access to highways, etc.
In general, large metropolitan areas should use a broad combination of these measures to reduce congestion.
Variable speeds and regulation of lane-changing improve the fluidity of traffic if they are applied correctly. That’s what you’re saying through your research. What is the proper way to apply these measures and why do they work?
Variable speed limits and regulation of lane-changing, when applied correctly, improve the fluidity of traffic, and this a fact that has been known in the scientific community for more than a decade. The problem lies in the fact that their effectiveness depends upon the way they are applied, and this is why it is important to carry out studies to better understand their functioning and then adapt it to each particular case.
In general terms, when speed limits are a little lower than normal, the result is that all the lanes are used in a homogeneous way: capacity increases and congestion is reduced. In this way, even though the speed limit may be lower, driving time is reduced because there is less congestion.
Limiting lane-changing is explained by the fact that a vehicle, when it changes lanes, occupies two lanes, the space of two vehicles, in addition to creating problems in the lane that is being left and in the one that the vehicle enters, and this reduces the capacity of the road.
Does the solution to traffic management problems on highways involve establishing flexible norms depending on the time of day, etc.?
Without any doubt the answer is yes: norms based not on pre-established times, but on the traffic conditions at that moment.
Going back to the example of variable speed limits, when the highway is near its capacity, it makes sense to reduce speeds so as to gain a little more capacity and thus reduce the driving time. But at other times of the day, shorter driving times will be achieved with higher speed limits, because the fact of gaining some capacity becomes irrelevant.
On the international level, there has been experience in using the freeway’s shoulder as an additional lane, closing access lanes to the highway because they create congestion on it, applying fluctuating toll charges according to demand, etc.

Do you think the arrival of the autonomous vehicle, and the interconnection between vehicles and highways, also implies a profound change in driving legislation?
Certainly there will have to be some legislative changes. For example, autonomous vehicles are going to eliminate drivers, who will be replaced by a single occupant of the vehicle. As a result, in the case of an accident, legal responsibility will fall to the party that is determined to be guilty, which might be the software that drives the vehicle or the improper state of maintenance of the road…
There must be new legal definitions of responsibility in the case of accidents, since by definition there is someone making decisions behind the wheel. In addition, there can be more changes made to facilitate coexistence between traditional and driverless vehicles.
Can you explain a little more about road trains? Just how do they work to improve traffic fluidity? A priori it would seem just the opposite…
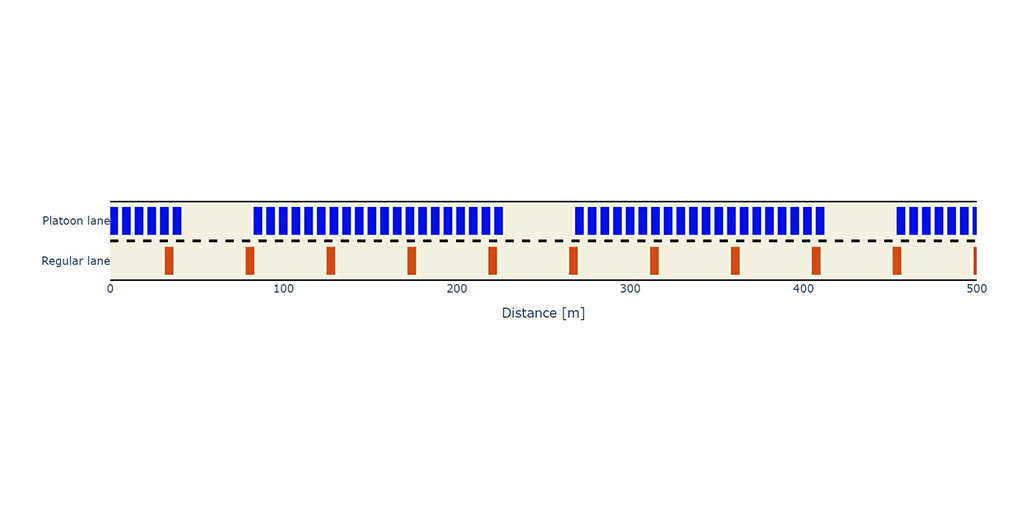
The road train is a series of moving vehicles that seem almost to be connected to each other thanks to their instant intercommunication and the speed of reaction and precision of their sensors. In practical terms, they move like a train whose different units are almost touching each other. But unlike a train, the connection would not be mechanical but electrical.
The great advantage of this kind of driving is that a number of vehicles can move at great speed while occupying very little space: the number of vehicles can be doubled or even tripled without adding another lane.
One way of visualizing it is to imagine the opposite case: how long railroad trains would be if there were 70 meters between one wagon and another, which is the minimum safety distance according to the current rules of the road. It would be a very inefficient system. Well, this is exactly the way things are on our highways because of the high reaction time that humans have, but which autonomous vehicles could solve.